An Overview of Human Pose Estimation with Deep Learning
Human Pose Estimation is one of the main research areas in computer vision. The reason for its importance is the abundance of applications that can benefit from such a technology. Here's an introduction to the different techniques used in Human Pose Estimation based on Deep Learning.
By Bharath Raj, Associate Engineer, and Yoni Osin, VP of R&D at BeyondMinds
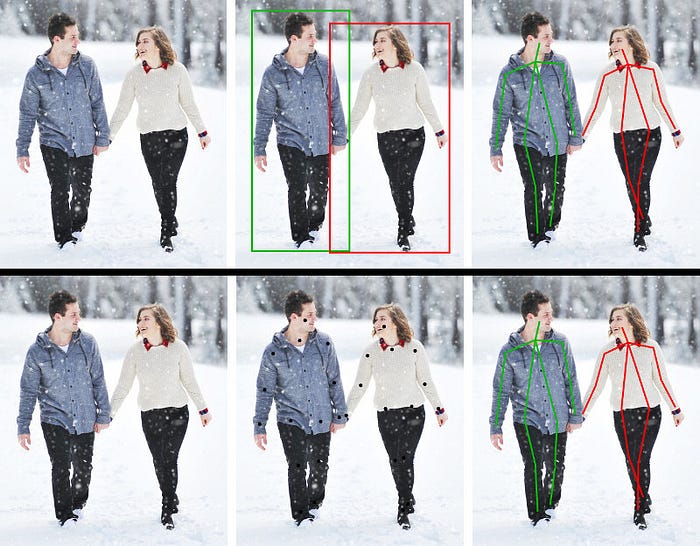
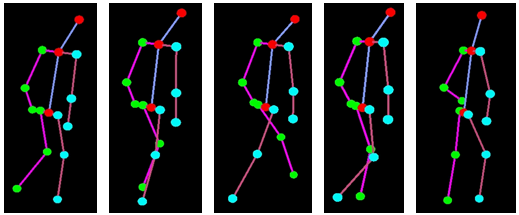
A Human Pose Skeleton represents the orientation of a person in a graphical format. Essentially, it is a set of coordinates that can be connected to describe the pose of the person. Each coordinate in the skeleton is known as a part (or a joint, or a keypoint). A valid connection between two parts is known as a pair (or a limb). Note that, not all part combinations give rise to valid pairs. A sample human pose skeleton is shown below.

Knowing the orientation of a person opens avenues for several real-life applications, some of which are discussed towards the end of this blog. Several approaches to Human Pose Estimation were introduced over the years. The earliest (and slowest) methods typically estimating the pose of a single person in an image which only had one person to begin with. These methods often identify the individual parts first, followed by forming connections between them to create the pose.
Naturally, these methods are not particularly useful in many real-life scenarios where images contain multiple people.
Multi-Person Pose Estimation
Multi-Person pose estimation is more difficult than the single person case as the location and the number of people in an image are unknown. Typically, we can tackle the above issue using one of two approaches:
- The simple approach is to incorporate a person detector first, followed by estimating the parts and then calculating the pose for each person. This method is known as the top-down approach.
- Another approach is to detect all parts in the image (i.e. parts of every person), followed by associating/grouping parts belonging to distinct persons. This method is known as the bottom-up approach.
Typically, the top-down approach is easier to implement than the bottom-up approach as adding a person detector is much simpler than adding associating/grouping algorithms. It is hard to judge which approach has better performance overall as it really comes down to which among the person detector and associating/grouping algorithms is better.
In this blog, we will focus on multi-person human pose estimation using deep learning techniques. In the next section, we will review some of the popular top-down and bottom-up approaches for the same.
Deep Learning Methods
1. OpenPose
OpenPose is one of the most popular bottom-up approaches for multi-person human pose estimation, partly because of their well documented GitHub implementation.
As with many bottom-up approaches, OpenPose first detects parts (key points) belonging to every person in the image, followed by assigning parts to distinct individuals. Shown below is the architecture of the OpenPose model.
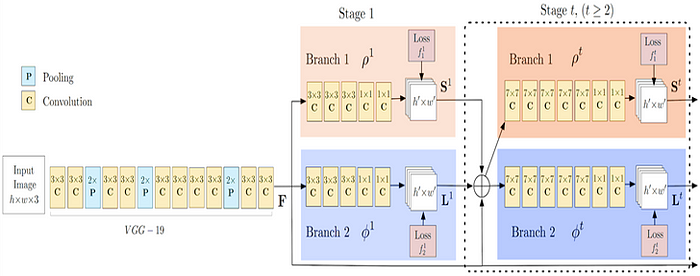
The OpenPose network first extracts features from an image using the first few layers (VGG-19 in the above flowchart). The features are then fed into two parallel branches of convolutional layers. The first branch predicts a set of 18 confidence maps, with each map representing a particular part of the human pose skeleton. The second branch predicts a set of 38 Part Affinity Fields (PAFs) which represents the degree of association between parts.
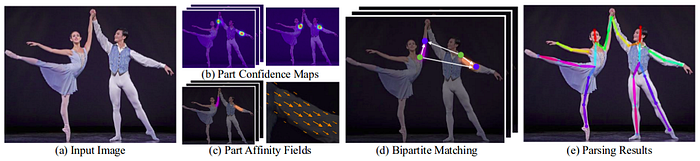
Successive stages are used to refine the predictions made by each branch. Using the part confidence maps, bipartite graphs are formed between pairs of parts (as shown in the above image). Using the PAF values, weaker links in the bipartite graphs are pruned. Through the above steps, human pose skeletons can be estimated and assigned to every person in the image. For a more thorough explanation of the algorithm, you may refer to their paper and to this blog post.
2. DeepCut
DeepCut is a bottom-up approach for multi-person human pose estimation. The authors approached the task by defining the following problems:
- Produce a set of
Dbody part candidates. This set represents all possible locations of body parts for every person in the image. Select a subset of body parts from the above set of body part candidates. - Label each selected body part with one of
Cbody part classes. The body part classes represent the types of parts, such as “arm”, “leg”, “torso” etc. - Partition body parts that belong to the same person.
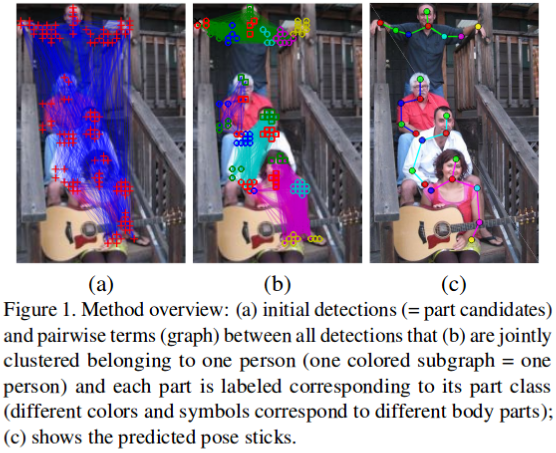
The above problems were jointly solved by modeling it into an Integer Linear Programming (ILP) problem. It is modeled by considering triples (x, y, z) of binary random variables with domains as stated in the images below.

Consider two body part candidates d and d' from the set of body part candidates D and classes c and c' from the set of classes C. The body part candidates were obtained through a Faster RCNN or a Dense CNN. Now, we can develop the following set of statements.
- If
x(d,c) = 1then it means that body part candidatedbelongs to classc. - Also,
y(d,d') = 1indicates that body part candidatesdandd'belong to the same person. - They also define
z(d,d’,c,c’) = x(d,c) * x(d’,c’) * y(d,d’). If the above value is 1, then it means that body part candidatedbelongs to classc, body part candidated'belongs to classc', and finally body part candidatesd,d’belong to the same person.
The last statement can be used to partition pose belonging to different people. Clearly, the above statements can be formulated in terms of linear equations as functions of (x,y,z). In this way, the Integer Linear Program (ILP) is set up, and the pose of multiple persons can be estimated. For the exact set of equations and much more detailed analysis, you can check out their paper here.
3. RMPE (AlphaPose)
RMPE is a popular top-down method of Pose Estimation. The authors posit that top-down methods are usually dependent on the accuracy of the person detector, as pose estimation is performed on the region where the person is located. Hence, errors in localization and duplicate bounding box predictions can cause the pose extraction algorithm to perform sub-optimally.
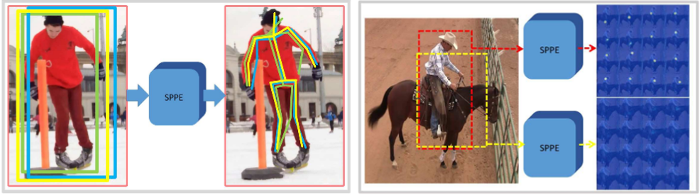
To resolve this issue, the authors proposed the usage of Symmetric Spatial Transformer Network (SSTN) to extract a high-quality single person region from an inaccurate bounding box. A Single Person Pose Estimator (SPPE) is used in this extracted region to estimate the human pose skeleton for that person. A Spatial De-Transformer Network (SDTN) is used to remap the estimated human pose back to the original image coordinate system. Finally, a parametric pose Non-Maximum Suppression (NMS) technique is used to handle the issue of redundant pose deductions.
Furthermore, the authors introduce a Pose Guided Proposals Generator to augment training samples that can better help train the SPPE and SSTN networks. The salient feature of RMPE is that this technique can be extended to any combination of a person detection algorithm and an SPPE.
4. Mask RCNN
Mask RCNN is a popular architecture for performing semantic and instance segmentation. The model parallelly predicts both the bounding box locations of the various objects in the image and a mask that semantically segments the object. The basic architecture can be quite easily extended for human pose estimation.
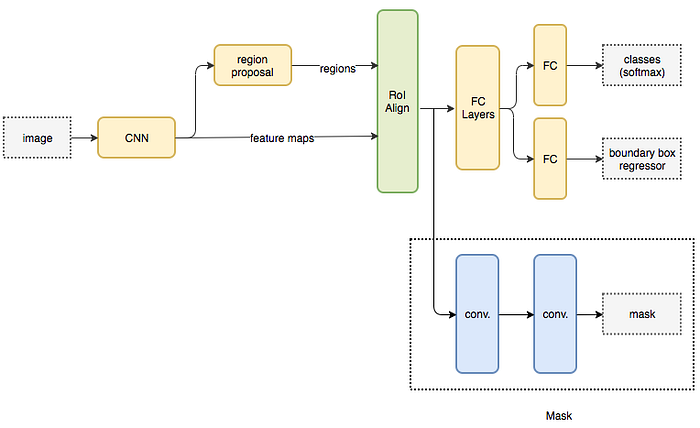
The basic architecture first extracts feature maps from an image using a CNN. These feature maps are used by a Region Proposal Network (RPN) to get bounding box candidates for the presence of objects. The bounding box candidates select an area (region) from the feature map extracted by the CNN. Since the bounding box candidates can be of various sizes, a layer called RoIAlign is used to reduce the size of the extracted feature such that they are all of the uniform size. Now, this extracted feature is passed into the parallel branches of CNNs for final prediction of the bounding boxes and the segmentation masks.
Let us focus on the branch that performs segmentation. Suppose an object in our image can belong to one among K classes. The segmentation branch outputs K binary masks of size m x m, where each binary mask represents all objects belonging to that class alone. We can extract key points belonging to every person in the image by modeling each type of keypoint as a distinct class and treating this like a segmentation problem.
Parallely, the objection detection algorithm can be trained to identify the location of the persons. By combining the information of the location of the person as well as their set of keypoints, we obtain the human pose skeleton for every person in the image.
This method nearly resembles the top-down approach, but the person detection stage is performed in parallel to the part detection stage. In other words, the keypoint detection stage and person detection stage are independent of each other.
5. Other Methods
Multi-Person Human Pose Estimation is a vast field with a plethora of approaches to tackle the problem. For brevity, only a select few approaches are explained here. For a more exhaustive list of approaches, you may check out the following links:
Applications
Pose Estimation has applications in myriad fields, some of which are listed below.
1. Activity Recognition
Tracking the variations in the pose of a person over a period of time can also be used for activity, gesture and gait recognition. There are several use cases for the same, including:
- Applications to detect if a person has fallen down or is sick.
- Applications that can autonomously teach proper workout regimes, sport techniques and dance activities.
- Applications that can understand full-body sign language. (Ex: Airport runway signals, traffic policemen signals, etc.).
- Applications that can enhance security and surveillance.
2. Motion Capture and Augmented Reality
An interesting application of human pose estimation is for CGI applications. Graphics, styles, fancy enhancements, equipment and artwork can be superimposed on the person if their human pose can be estimated. By tracking the variations of this human pose, the rendered graphics can “naturally fit” the person as they move.

A good visual example of what is possible can be seen through Animoji. Even though the above only tracks the structure of a face, the idea can be extrapolated for the key points of a person. The same concepts can be leveraged to render Augmented Reality (AR) elements that can mimic the movements of a person.
3. Training Robots
Instead of manually programming robots to follow trajectories, robots can be made to follow the trajectories of a human pose skeleton that is performing an action. A human instructor can effectively teach the robot certain actions by just demonstrating the same. The robot can then calculate how to move its articulators to perform the same action.
4. Motion Tracking for Consoles
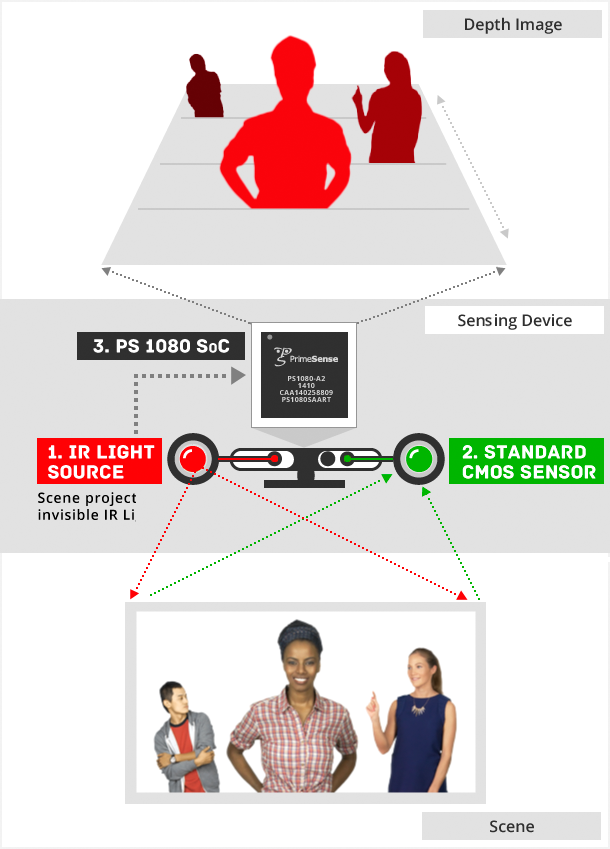
An interesting application of pose estimation is for tracking the motion of human subjects for interactive gaming. Popularly, Kinect used 3D pose estimation (using IR sensor data) to track the motion of the human players and to use it to render the actions of the virtual characters.
Conclusion
Great strides have been made in the field of human pose estimation, which enables us to better serve the myriad applications that are possible with it. Moreover, research in related fields such as Pose Tracking can greatly enhance its productive utilization in several fields. The concepts listed in this blog are not exhaustive but rather strives to introduce some popular variants of these algorithms and their real-life applications.
Bharath Raj is an associate engineer at Siemens PLM Software. He loves to experiment with Machine Learning and Computer Vision concepts. You can check out his projects here.
Yoni Osin is the VP of R&D at BeyondMinds
Original. Reposted with permission.
Related: