The 8 Neural Network Architectures Machine Learning Researchers Need to Learn
The 8 Neural Network Architectures Machine Learning Researchers Need to Learn
 The 8 Neural Network Architectures Machine Learning Researchers Need to Learn
The 8 Neural Network Architectures Machine Learning Researchers Need to LearnIn this blog post, I want to share the 8 neural network architectures from the course that I believe any machine learning researchers should be familiar with to advance their work.
Why do we need Machine Learning?
Machine learning is needed for tasks that are too complex for humans to code directly. Some tasks are so complex that it is impractical, if not impossible, for humans to work out all of the nuances and code for them explicitly. So instead, we provide a large amount of data to a machine learning algorithm and let the algorithm work it out by exploring that data and searching for a model that will achieve what the programmers have set it out to achieve.
Let’s look at these 2 examples:
- It is very hard to write programs that solve problems like recognizing a 3-dimensional object from a novel viewpoint in new lighting conditions in a cluttered scene. We don’t know what program to write because we don’t know how it’s done in our brain. Even if we had a good idea about how to do it, the program might be horrendously complicated.
- It is hard to write a program to compute the probability that a credit card transaction is fraudulent. There may not be any rules that are both simple and reliable. We need to combine a very large number of weak rules. Fraud is a moving target but the program needs to keep changing.
Then comes the Machine Learning Approach: Instead of writing a program by hand for each specific task, we collect lots of examples that specify the correct output for a given input. A machine learning algorithm then takes these examples and produces a program that does the job. The program produced by the learning algorithm may look very different from a typical hand-written program. It may contain millions of numbers. If we do it right, the program works for new cases as well as the ones we trained it on. If the data changes the program can change too by training on the new data. You should note that massive amounts of computation are now cheaper than paying someone to write a task-specific program.
Given that, some examples of tasks best solved by machine learning include:
- Recognizing patterns: Objects in real scenes, Facial identities or facial expressions, Spoken words
- Recognizing anomalies: Unusual sequences of credit card transactions, Unusual patterns of sensor readings in a nuclear power plant
- Prediction: Future stock prices or currency exchange rates, Which movies will a person like
What are Neural Networks?
Neural networks are a class of models within the general machine learning literature. So for example, if you took a Coursera course on machine learning, neural networks will likely be covered. Neural networks are a specific set of algorithms that has revolutionized the field of machine learning. They are inspired by biological neural networks and the current so called deep neural networks have proven to work quite very well. Neural Networks are themselves general function approximations, that is why they can be applied to literally almost any machine learning problem where the problem is about learning a complex mapping from the input to the output space.
Here are the 3 reasons to convince you to study neural computation:
- To understand how the brain actually works: It’s very big and very complicated and made of stuff that dies when you poke it around. So we need to use computer simulations.
- To understand a style of parallel computation inspired by neurons and their adaptive connections: It’s a very different style from a sequential computation.
- To solve practical problems by using novel learning algorithms inspired by the brain: Learning algorithms can be very useful even if they are not how the brain actually works.
After finishing the famous Andrew Ng’s Machine Learning Coursera course, I started developing interest towards neural networks and deep learning. Thus, I started looking at the best online resources to learn about the topics and found Geoffrey Hinton’s Neural Networks for Machine Learning course. If you are a deep learning practitioner or someone who want to get into the deep learning/machine learning world, you should really take this course. Geoffrey Hinton is without a doubt a godfather of the deep learning world. And he actually provided something extraordinary in this course. In this blog post, I want to share the 8 neural network architectures from the course that I believe any machine learning researchers should be familiar with to advance their work.

Generally, these architectures can be put into 3 specific categories:
1 — Feed-Forward Neural Networks
These are the commonest type of neural network in practical applications. The first layer is the input and the last layer is the output. If there is more than one hidden layer, we call them “deep” neural networks. They compute a series of transformations that change the similarities between cases. The activities of the neurons in each layer are a non-linear function of the activities in the layer below.
2 — Recurrent Networks
These have directed cycles in their connection graph. That means you can sometimes get back to where you started by following the arrows. They can have complicated dynamics and this can make them very difficult to train. They are more biologically realistic.
There is a lot of interest at present in finding efficient ways of training recurrent nets. Recurrent neural networks are a very natural way to model sequential data. They are equivalent to very deep nets with one hidden layer per time slice; except that they use the same weights at every time slice and they get input at every time slice. They have the ability to remember information in their hidden state for a long time but is very hard to train them to use this potential.
3 — Symmetrically Connected Networks
These are like recurrent networks, but the connections between units are symmetrical (they have the same weight in both directions). Symmetric networks are much easier to analyze than recurrent networks. They are also more restricted in what they can do because they obey an energy function. Symmetrically connected nets without hidden units are called “Hopfield Nets.” Symmetrically connected network with hidden units are called “Boltzmann machines.”
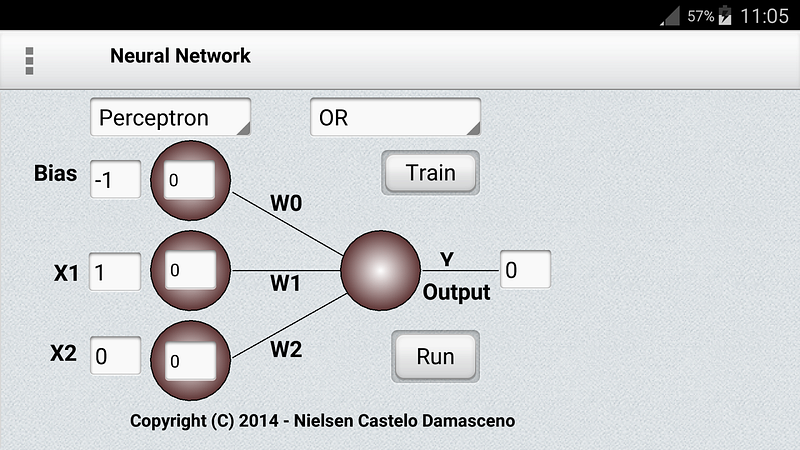
1 — Perceptrons
Considered the first generation of neural networks, perceptrons are simply computational models of a single neuron. They were popularized by Frank Rosenblatt in the early 1960s. They appeared to have a very powerful learning algorithm and lots of grand claims were made for what they could learn to do. In 1969, Minsky and Papers published a book called “Perceptrons” that analyzed what they could do and showed their limitations. Many people thought these limitations applied to all neural network models. However, the perceptron learning procedure is still widely used today for tasks with enormous feature vectors that contain many millions of features.
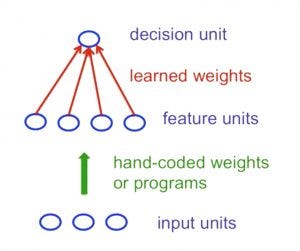
In the standard paradigm for statistical pattern recognition, we first convert the raw input vector into a vector of feature activations. We then use hand-written programs based on common-sense to define the features. Next, we learn how to weight each of the feature activations to get a single scalar quantity. If this quantity is above some threshold, we decide that the input vector is a positive example of the target class.
The standard Perceptron architecture follows the feed-forward model, meaning inputs are sent into the neuron, are processed, and result in an output. In the diagram below, this means the network reads bottom-up: input comes in from the bottom and output goes out from the top.
However, Perceptrons do have limitations: If you are followed to choose the features by hand and if you use enough features, you can do almost anything. For binary input vectors, we can have a separate feature unit for each of the exponentially many binary vectors and so we can make any possible discrimination on binary input vectors. But once the hand-coded features have been determined, there are very strong limitations on what a perceptron can learn.
This result is devastating for Perceptrons because the whole point of pattern recognition is to recognize patterns despite transformations like translation. Minsky and Papert’s “Group Invariance Theorem” says that the part of a Perceptron that learns cannot learn to do this if the transformations form a group. To deal with such transformations, a Perceptron needs to use multiple feature units to recognize transformations of informative sub-patterns. So the tricky part of pattern recognition must be solved by the hand-coded feature detectors, not the learning procedure.
Networks without hidden units are very limited in the input-output mappings they can learn to model. More layers of linear units do not help. It’s still linear. Fixed output non-linearities are not enough. Thus, we need multiple layers of adaptive, non-linear hidden units. But how we train such nets? We need an efficient way of adapting all the weights, not just the last layer. This is hard. Learning the weights going into hidden units is equivalent to learning features. This is difficult because nobody is telling us directly what the hidden units should do.
2 — Convolutional Neural Networks
Machine Learning research has focused extensively on object detection problems over the time. There are various things that make it hard to recognize objects:
- Segmentation: Real scenes are cluttered with other objects. It’s hard to tell which pieces go together as parts of the same object. Parts of an object can be hidden behind other objects.
- Lighting: The intensities of the pixels are determined as much by the lighting as by the objects.
- Deformation: Objects can deform in a variety of non-affine ways. E.g., a handwritten too can have a large loop or just a cusp.
- Affordances: Object classes are often defined by how they are used. E.g., chairs are things designed for sitting on so they have a wide variety of physical shapes.
- Viewpoint: Changes in viewpoint cause changes in images that standard learning methods cannot cope with. Information hops between input dimensions (i.e. pixels)
- Imagine a medical database in which the age of a patient sometimes hopes to the input dimension that normally codes for weight! To apply machine learning we would first want to eliminate this dimension-hopping.

The replicated feature approach is currently the dominant approach for neural networks to solve object detection problem. It uses many different copies of the same feature detector with different positions. It could also replicate across scale and orientation, which is tricky and expensive. Replication greatly reduces the number of free parameters to be learned. It uses several different feature types, each with its own map of replicated detectors. It also allows each patch of image to be represented in several ways.
So what does replicating the feature detectors achieve?
- Equivalent activities: Replicated features do not make the neural activities invariant to translation. The activities of are equivariant.
- Invariant knowledge: If a feature is useful in some locations during training, detectors for that feature will be available in all locations during testing.
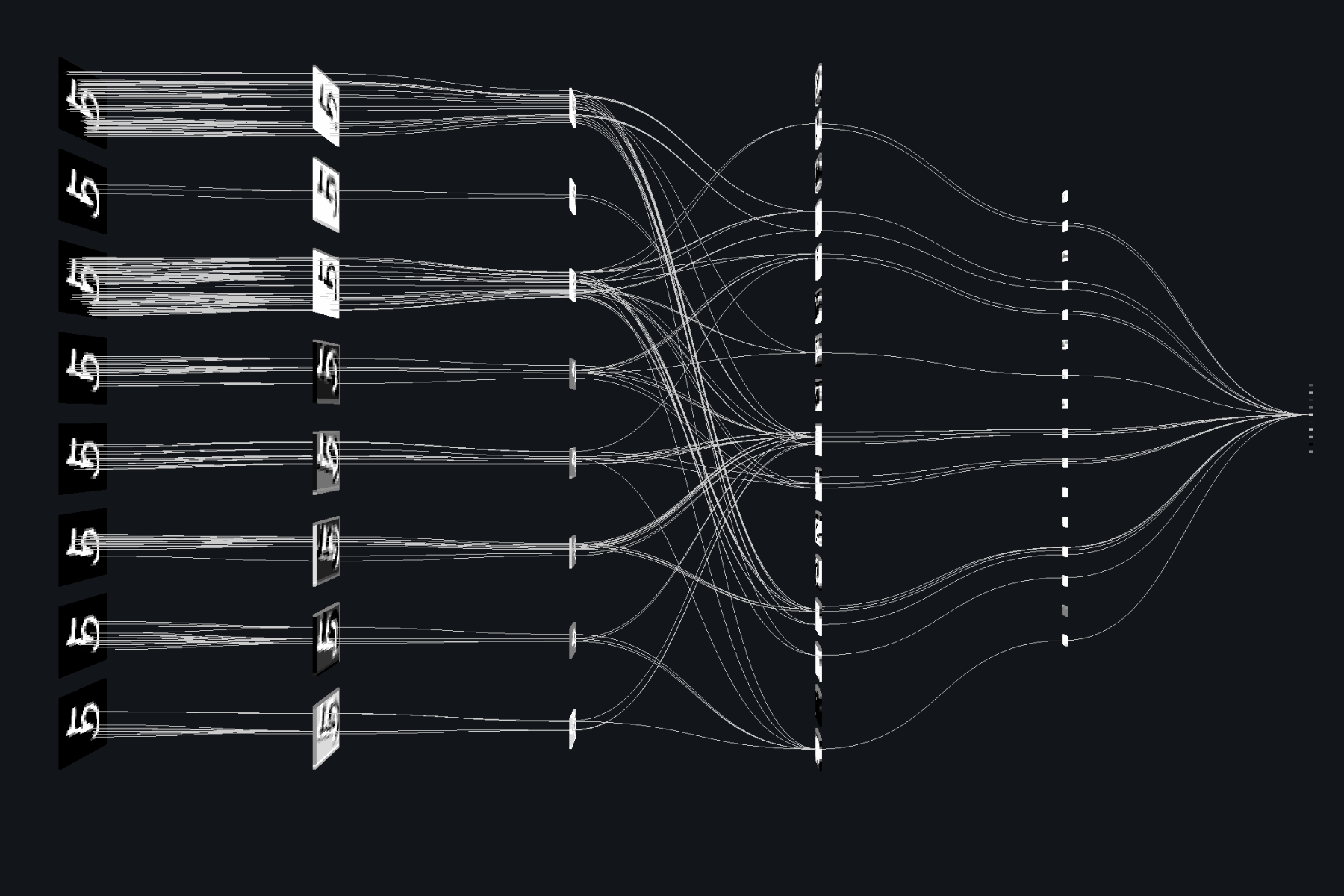
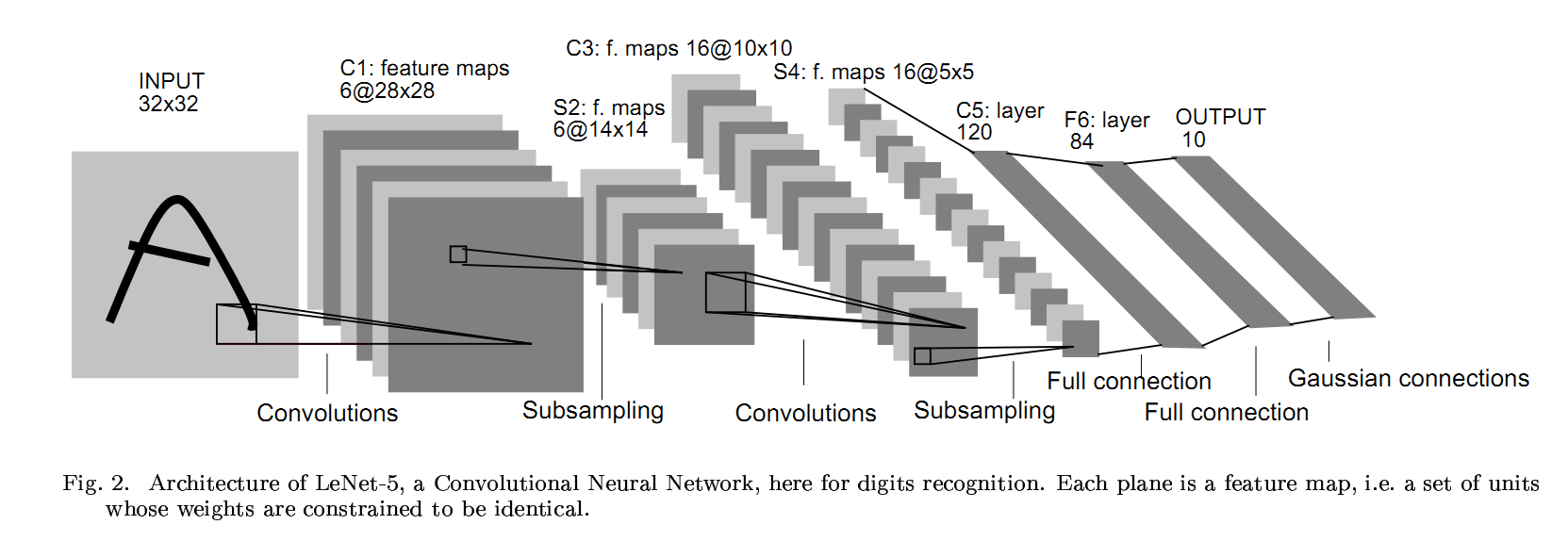
In 1998, Yann LeCun and his collaborators developed a really good recognizer for handwritten digits called LeNet. It used back propagation in a feedforward net with many hidden layers, many maps of replicated units in each layer, pooling of the outputs of nearby replicated units, a wide net that can cope with several characters at once even if they overlap, and a clever way of training a complete system, not just a recognizer. Later it is formalized under the name convolutional neural networks. Fun fact: This net was used for reading ~10% of the checks in North America.
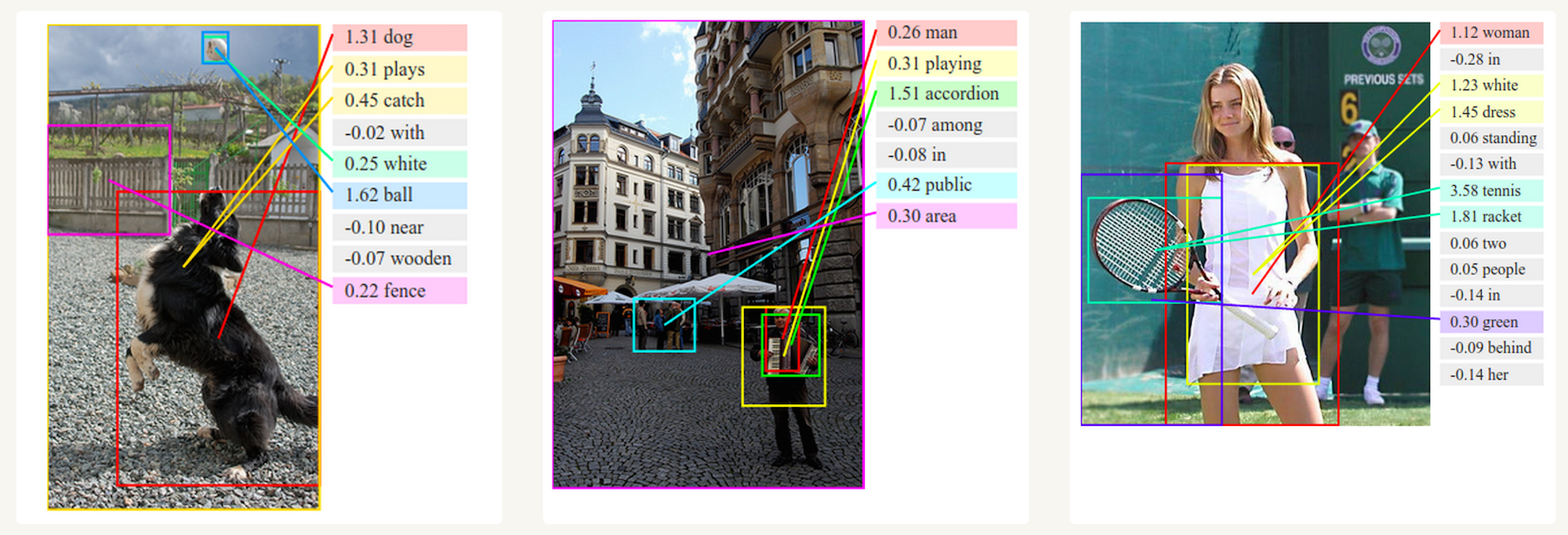
Convolutional Neural Networks can be used for all work related to object recognition from hand-written digits to 3D objects. However, recognizing real objects in color photographs downloaded from the web is much more complicated than recognizing hand-written digits. There are hundred times as many classes (1000 vs 10), hundred times as many pixels (256 x 256 color vs 28 x 28 gray), two-dimensional images of three-dimensional scenes, cluttered scenes requiring segmentation, and multiple objects in each image. Will the same type of convolutional neural network work?
Then came the ILSVRC-2012 competition on ImageNet, a dataset with approximately 1.2 million high-resolution training images. Test images will be presented with no initial annotation (no segmentation or labels) and algorithms will have to produce labelings specifying what objects are present in the images. Some of the best existing computer vision methods were tried on this dataset by leading computer vision groups from Oxford, INRIA, XRCE… Typically, computer vision systems use complicated multi-stage systems and the early stages are typically hand-tuned by optimizing a few parameters.

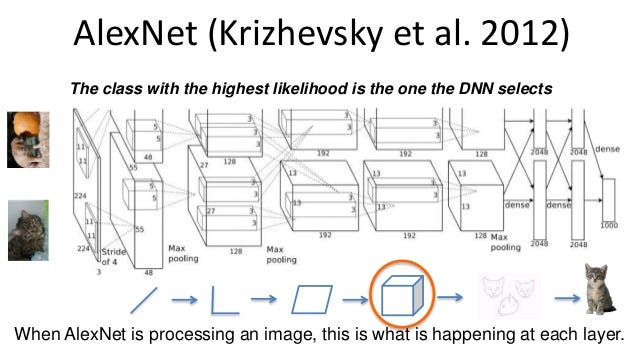
The winner of the competition, Alex Krizhevsky (NIPS 2012), developed a very deep convolutional neural net of the type pioneered by Yann LeCun. Its architecture includes 7 hidden layers not counting some max-pooling layers. The early layers were convolutional, while the last 2 layers were globally connected. The activation functions were rectified linear units in every hidden layer. These train much faster and are more expressive than logistic units. In addition to that, it also uses competitive normalization to suppress hidden activities when nearby units have stronger activities. This helps with variations in intensity.
There are a couple of technical tricks that significantly improve generalization for the neural net:
- Training on random 224 x 224 patches from the 256 x 256 images to get more data and using left-right reflections of the images. At test time, combining the opinions from 10 different patches: The four 224 x 224 corner patches plus the central 224 x 224 patch plus the reflections of those 5 patches.
- Using “dropout” to regularize the weights in the globally connected layers (which contain most of the parameters). Dropout means that half of the hidden units in a layer are randomly removed for each training example. This stops hidden units from relying too much on other hidden units.
In terms of hardware requirement, Alex uses a very efficient implementation of convolutional nets on 2 Nvidia GTX 580 GPUs (over 1000 fast little cores). The GPUs are very good for matrix-matrix multiplies and also have very high bandwidth to memory. This allows him to train the network in a week and makes it quick to combine results from 10 patches at test time. We can spread a network over many cores if we can communicate the states fast enough. As cores get cheaper and datasets get bigger, big neural nets will improve faster than old-fashioned computer vision systems.
3 — Recurrent Neural Network
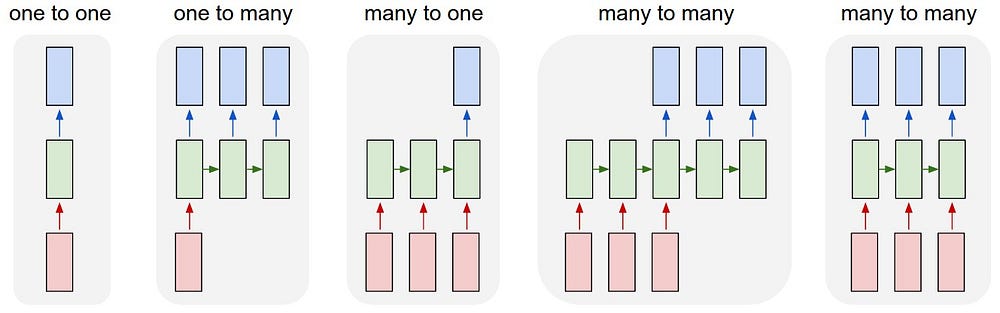
To understand RNNs, we need to have a brief overview of sequence modeling. When applying machine learning to sequences, we often want to turn an input sequence into an output sequence that lives in a different domain; for example, turn a sequence of sound pressures into a sequence of word identities. When there is no separate target sequence, we can get a teaching signal by trying to predict the next term in the input sequence. The target output sequence is the input sequence with an advance of 1 step. This seems much more natural than trying to predict one pixel in an image from the other pixels, or one patch of an image from the rest of the image. Predicting the next term in a sequence blurs the distinction between supervised and unsupervised learning. It uses methods designed for supervised learning, but it doesn’t require a separate teaching signal.
Memoryless models are the standard approach to this task. In particular, autoregressive models can predict the next term in a sequence from a fixed number of previous terms using “delay taps; and feed-forward neural nets are generalized autoregressive models that use one or more layers of non-linear hidden units. However, if we give our generative model some hidden state, and if we give this hidden state its own internal dynamics, we get a much more interesting kind of model: It can store information in its hidden state for a long time. If the dynamics are noisy and the way they generate outputs from their hidden state is noisy, we can never know its exact hidden state. The best we can do is to infer a probability distribution over the space of hidden state vectors. This inference is only tractable for 2 types of hidden state model.
Recurrent Neural Networks are very powerful, because they combine 2 properties: 1) distributed hidden state that allows them to store a lot of information about the past efficiently, and 2) non-linear dynamics that allow them to update their hidden state in complicated ways. With enough neurons and time, RNNs can compute anything that can be computed by your computer. So what kinds of behavior can RNNs exhibit? They can oscillate, they can settle to point attractors, they can behave chaotically. And they could potentially learn to implement lots of small programs that each capture a nugget of knowledge and run in parallel, interacting to produce very complicated effects.
However, the computational power of RNNs makes them very hard to train. It is quite difficult to train a RNN because of the exploding or vanishing gradients problem. As we backpropagate through many layers, what happens to the magnitude of the gradients? If the weights are small, the gradients shrink exponentially. If the weights are big, the gradients grow exponentially. Typical feed-forward neural nets can cope with these exponential effects because they only have a few hidden layers. On the other hand, in a RNN trained on long sequences, the gradients can easily explode or vanish. Even with good initial weights, it’s very hard to detect that the current target output depends on an input from many time-steps ago, so RNNs have difficulty dealing with long-range dependencies.
There are essentially 4 effective ways to learn a RNN:
- Long Short Term Memory: Make the RNN out of little modules that are designed to remember values for a long time.
- Hessian Free Optimization: Deal with the vanishing gradients problem by using a fancy optimizer that can detect directions with a tiny gradient but even smaller curvature.
- Echo State Networks: Initialize the input -> hidden and hidden -> hidden and output -> hidden connections very carefully so that the hidden state has a huge reservoir of weakly coupled oscillators which can be selectively driven by the input.
- Good initialization with momentum: Initialize like in Echo State Networks, but then learn all of the connections using momentum.
4 — Long/Short Term Memory Network
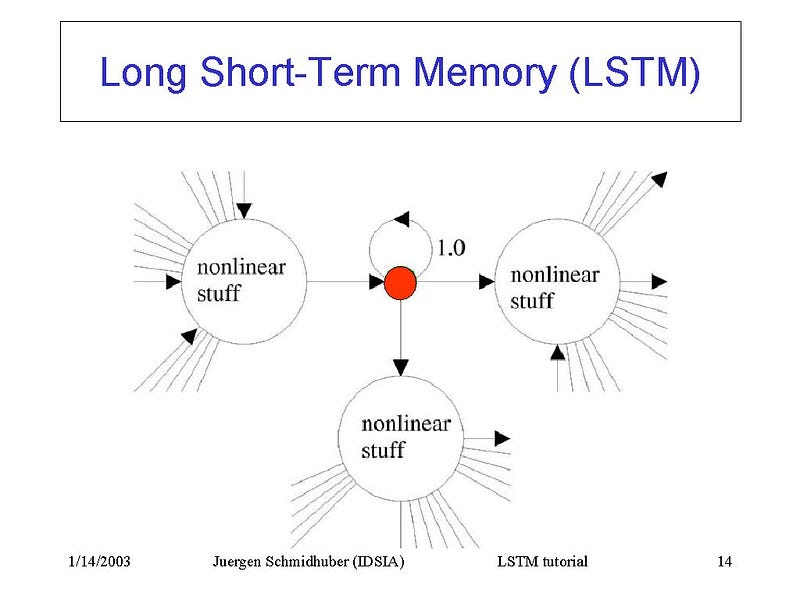
Hochreiter & Schmidhuber (1997) solved the problem of getting a RNN to remember things for a long time (like hundreds of time steps) by building what known as long-short term memory network. They designed a memory cell using logistic and linear units with multiplicative interactions. Information gets into the cell whenever its “write” gate is on. The information stays in the cell so long as its “keep” gate is on. Information can be read from the cell by turning on its “read” gate.
Reading cursive handwriting is a natural task for an RNN. The input is a sequence of (x, y, p) coordinates of the tip of the pen, where p indicates whether the pen is up or down. The output is a sequence of characters. Graves & Schmidhuber (2009) showed that RNNs with LSTM are currently the best systems for reading cursive writing. In brief, they used a sequence of small images as input rather than pen coordinates.